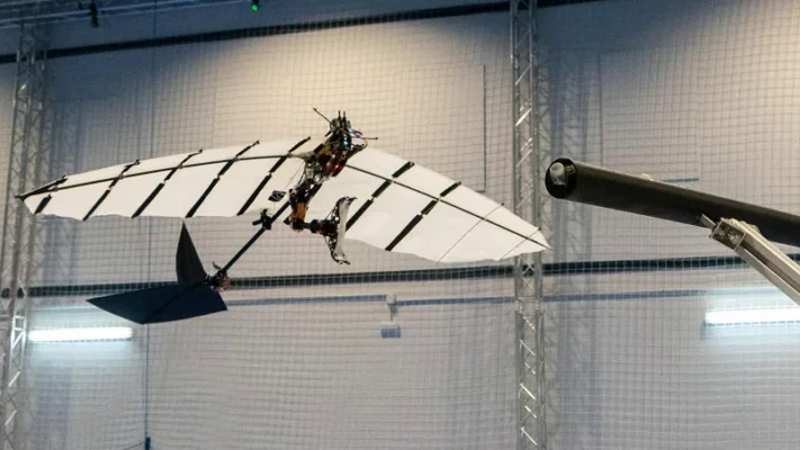
Безпілотники-орнітоптери з махаючими крилами потенційно можуть бути більш спритними та енергоефективними, ніж їхні аналоги з фіксованим крилом, але більшість із них все одно не можуть тинятися на одному місці. Нова модель усуває це обмеження, використовуючи механізм кігтів, щоб тимчасово сідати, як птах.
Прототип автономного орнітоптера під назвою P-Flap (Perching Flapping-Wing Robot) має розмах крил 1,5 м (59 дюймів) і вагу лише 700 грамів (25 унцій). Його розробив Рафаель Цуффрі, докторант швейцарського дослідницького інституту EPFL, – повідомляє Рortaltele.
Він створив і випробував пристрій у співпраці з колегами з іспанського Університету Севільї в рамках проєкту GRIFFIN Європейського Союзу. GRIFFIN розшифровується як «загальносумісна повітряна робототехнічна система маніпулювання, що об’єднує фіксовані та махаючі крила для збільшення радіуса дії та безпеки».
Щоб захоплювати такі цілі, як гілки або труби, P-Flap оснащено єдиним механічним кігтем із вуглецевого волокна з пружиною. Цей пристрій є бістабільним, тобто йому не потрібно живлення, щоб залишатися як у відкритому, так і в закритому стані. Він з’єднаний з нижньою стороною дрона за допомогою ніжки з сервоприводом, яка може рухати його за потреби.
Коли P-Flap наближається до горизонтального стрижня в поточній установці тестування в приміщенні, він керується даними, які передаються по бездротовому зв’язку із зовнішньої системи захоплення руху. Ці дані дозволяють безпілотнику знати його місцеперебування відносно штанги, тому його бортова система керування польотом може регулювати нахил, поворот і висоту, щоб вразити ціль.
Коли його кіготь досягає 1 метра (3,3 фута) від вудилища, датчик лінійного бачення в основі кігтя надає точніші позиційні дані, активуючи сервопривід ноги для точного позиціювання. Коли два виступи на відкритій внутрішній стороні кігтя згодом потрапляють у ціль, тиск змушує кігті автоматично замикатися навколо стрижня лише за 25 мілісекунд, міцно утримуючи P-Flap на місці.
Коли настає час залишити окуня та продовжити політ, моторизований гвинтовий механізм у стрижні кігтя знову відкриває його назад.Р-закрилок наближається до своєї цілі, розташованої на висоті 2 м (6,6 фута) над підлогою
У реальному світі безпілотник міг би виконувати такі дії, як спостереження за наземними об’єктами, збір біологічних зразків з дерев або підзарядка акумулятора за допомогою інтегрованих сонячних панелей. З усім тим, тим часом ще потрібно зробити більше.
«На цей час експерименти з польотом проводяться в приміщенні, тому що нам потрібна контрольована зона польоту з точною локалізацією від системи захоплення руху», — сказав Цуффрі. «У майбутньому ми хотіли б збільшити автономність робота, щоб виконувати завдання сідати та маніпулювати на відкритому повітрі в більш непередбачуваному середовищі».